Marine geophysical mapping
High resolution geophysical equipment (sonars)
- 24 kHz Single beam Sub-bottom profiler (pinger), Portable
- 2–9 kHz Sub-bottom profiler (pinger), Dual transducers
-
Edgetech SB-0512 Sub-bottom profiler

Portable (on pallet, 204 kg)
Frequency Range: 500 Hz–12 kHz
Vertical Resolution (depends on pulse selected) 8–20 cm
Penetration (typical) in clay: 200 m
Weight in Water: 68 kg
www.edgetech.com
- Edgetech SB-216 Sub-bottom profiler
Portable (76 kg)
Frequency Range: 2–16 kHz
Vertical Resolution (depends on pulse selected): 6–10 cm
Penetration (typical) in clay: 80 metersWeight in Water: 32 kg
www.edgetech.com
- Kongsberg EA600 Single Beam Echo sounder, Hull-mounted on R/V Skidbladne
-
Kongsberg EM122 (1x1°) – Multibeam sonar
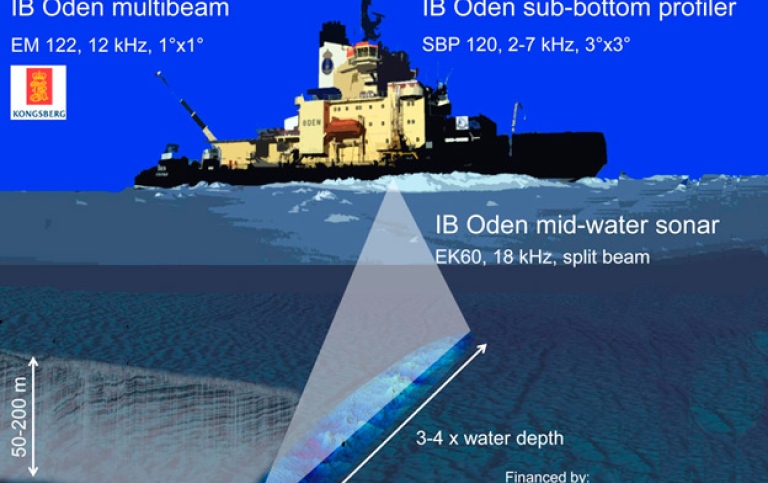
Hull-mounted on Icebreaker Oden
Depth range: 20 to 11000 m
Frequency: 12 kHz (chirp mode and dual swath capability)
Swath width: 4–5 times the water depth
Beam width: 150°x1°
Beams: 288 beams covering a sector up to 150°
www.km.kongsberg.com
-
Kongsberg EM2040 (1°) – Multibeam sonar
 R/V Skidbladner in mapping action with both the bow-mounted EM2040 (200-400 kHz) and side-mounted EA600 (15 kHz) sub-bottom profiler in the water.
R/V Skidbladner in mapping action with both the bow-mounted EM2040 (200-400 kHz) and side-mounted EA600 (15 kHz) sub-bottom profiler in the water.
Mounted on R/V Skidbladner, but is portable
Depth range: 0.5 to 600 m
Frequency: 200–400 kHz
Swath width: max 750 m
Beam width: 140° x 0.7°
Note: well suited for surveys meeting the IHO-S44 special order requirements.
www.km.kongsberg.com
Bow mount of EM2040 on R/V Skidbladner. The GPS on photo are two Hemisphere A101 for heading and one center-mounted Hemisphere R320 (RTK GPS/Glonass) for positioning. In 2015 the positioning system was upgraded to a Seapath 320+. An MRU5+ is mounted on the transducer casing in a subsea bottle.
-
Kongsberg SBP120 (3°) – Chirp sonar (sub-bottom profiler)
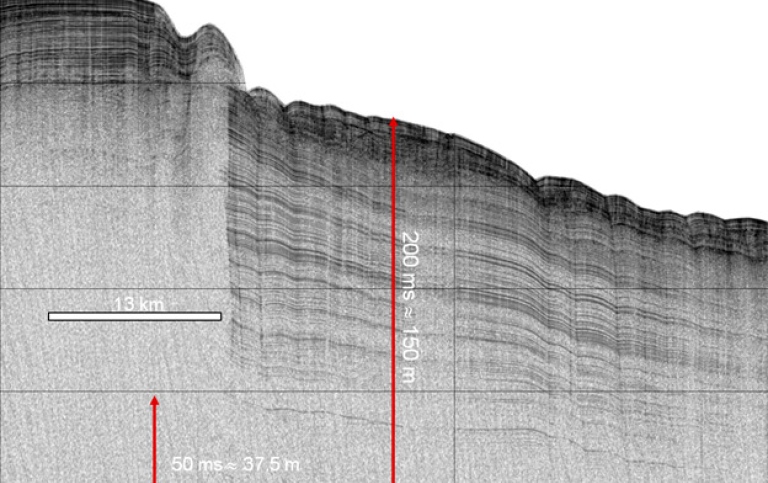
Hull-mounted on Icebreaker Oden
Depth range: 20 to 11000 m
Frequency range: 3–7 kHz, chirp
Vertical resolution: 0.35 ms
Horizontal resolution: 3°x3°
Integrated with EM120 by using the same receiving transducer array
www.km.kongsberg.com
- L-3 Klein 3000 Digital Side Scan Sonar
Portable
Depth Range: 600/150 m (operating depth down to 1500 m)
Frequency: 100/500 kHz
Swath width: max 750 m
Beam width: 0.7°/0.21°
- Oden Multibeam and Chirp Sonar System
Please see information about Oden Multibeam and Chirp Sonar System under Marine platforms page.
-
SIMRAD EK60 – Scientific echo sounder for water column data/fish tracking
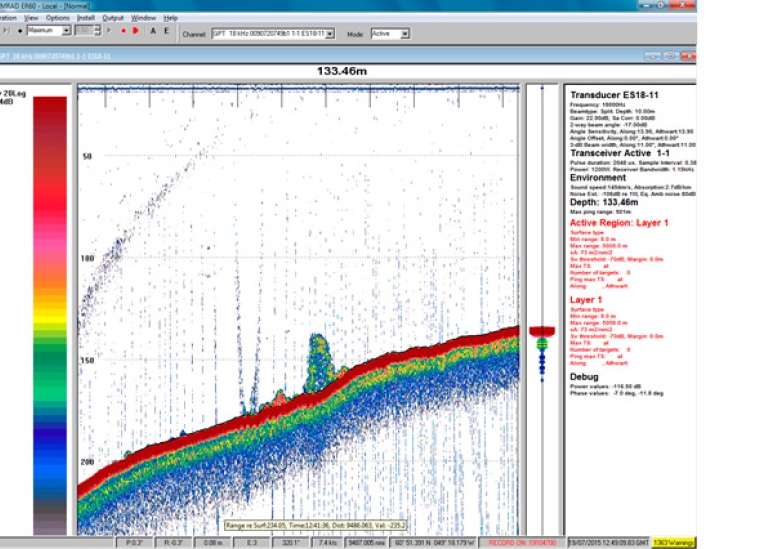 Screen capture showing gas seeps from continental slope off western Greenland. Disturbances are from additional echo sounder.
Screen capture showing gas seeps from continental slope off western Greenland. Disturbances are from additional echo sounder.
Installed on icebreaker Oden
Frequency: 18 kHz (possible additional frequencies 18-710 kHz)
Beam width: 20x7° (140°)
Depth range: Full ocean depth
www.simrad.com -
Seapath 320 GPS/GLONASS including MRU5

Installed on Icebreaker Oden
Heading accuracy: 0.05 RMS (4 m baseline)
Roll and pitch accuracy: 0.03 RMS for ±5° amplitude.
Heave accuracy: 5 cm or 5% whichever is highest
Positioning accuracy: (best case) 0.15 m RMS or 0.4 m (95% CEP)
www.km.kongsberg.com
 MRU5+ plus installed in a subsea bottle mounted on the top side of the EM2040 transducer casing. The EM2040 bow-mounted system on R/V Skidbladner is here shown in transport mode, hoisted up on deck. In 2015, the positioning system was changed to the Seapath 330+ including new GPS/GLONASS antennas shown in the photo below. The subsea bottle was also changed to a newer version. The antenna separation has been increased from 1.5 to 2 m.
MRU5+ plus installed in a subsea bottle mounted on the top side of the EM2040 transducer casing. The EM2040 bow-mounted system on R/V Skidbladner is here shown in transport mode, hoisted up on deck. In 2015, the positioning system was changed to the Seapath 330+ including new GPS/GLONASS antennas shown in the photo below. The subsea bottle was also changed to a newer version. The antenna separation has been increased from 1.5 to 2 m. MRU5+ plus installed in a subsea bottle mounted on the top side of the EM2040 transducer casing. The EM2040 bow-mounted system on R/V Skidbladner is here shown in transport mode, hoisted up on deck. In 2015, the positioning system was changed to the Seapath 330+ including new GPS/GLONASS antennas shown in the photo below. The subsea bottle was also changed to a newer version. The antenna separation has been increased from 1.5 to 2 m.
MRU5+ plus installed in a subsea bottle mounted on the top side of the EM2040 transducer casing. The EM2040 bow-mounted system on R/V Skidbladner is here shown in transport mode, hoisted up on deck. In 2015, the positioning system was changed to the Seapath 330+ including new GPS/GLONASS antennas shown in the photo below. The subsea bottle was also changed to a newer version. The antenna separation has been increased from 1.5 to 2 m.
Single-channel seismic equipment
- 2 Bauer Air compressors, Portable (on pallets)
- 2 Bolt Pneumatic Air Release (PAR) airgun, Portable 1500 cubic inches with amplifier
- 2x20 m Hydrophone streamer, Portable (on pallets)100 hydrophone elements each
- 3 Reavell Compair Air compressors, Portable (on pallets)
- Bolt 600 Pneumatic Air Release (PAR) airgun
Portable
1–40 cubic inches with amplifier
Frequency range: 20–500 Hz
Towing depth: 1 to 2 meters
Pulse duration: 10 msec typical - Digital recording units, Portable
Other geophysical equipment
- Geometrics G-880 marine magnetometer
Portable
Measured Quantity: Total Magnetic field in nT at 1sec sample interval
Operating Principle: Self Oscillating split beam Optically pumped Caesium Vapor cell (non-radioactive)
Heading Error: < +/- 0.5nT over entire 360° range
Absolute Accuracy: ±2nT throughout range
Operating Range: 20,000nT to 100,000nT
Pressure Rating: 2000 psi (approx 1300 metres)
Operating Zones: The earth’s field vector should be > 6° away from the sensor’s equator and > 6° away from the sensor’s long axis. Automatic hemisphere switching.
www.oceanscan.net

Last updated: May 13, 2024
Source: Institutionen för geologiska vetenskaper